\スタッフ厳選!日本HP おすすめパソコン/


前回の記事ではダイクストラ法のなんとなくのイメージを解説しました。
前回の記事ではルートの算出までは扱っていなかったので、今回は最小コストのルートを求める方法をざっくり解説します。
ダイクストラ法の流れに合わせてルートの算出を行います。
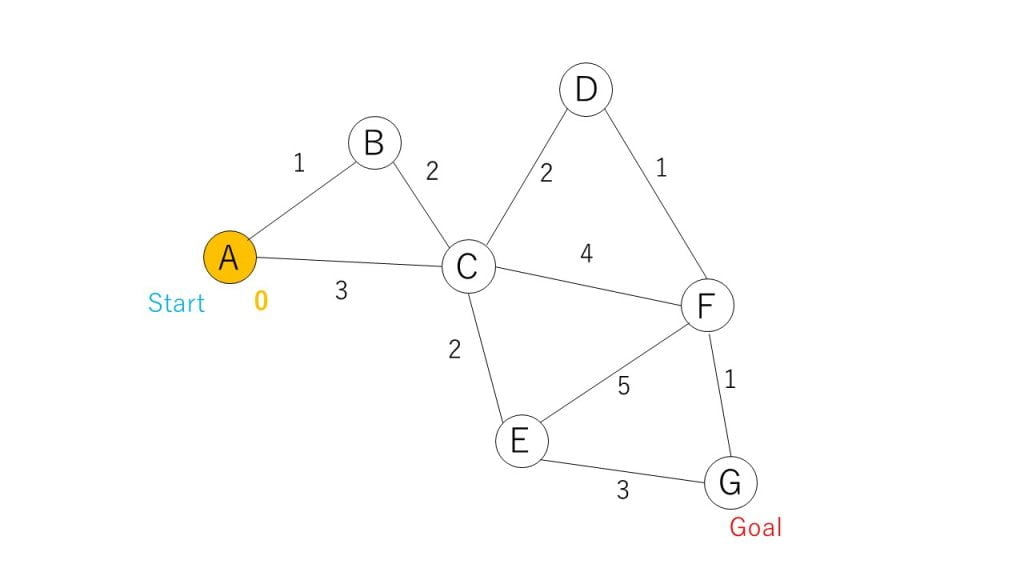
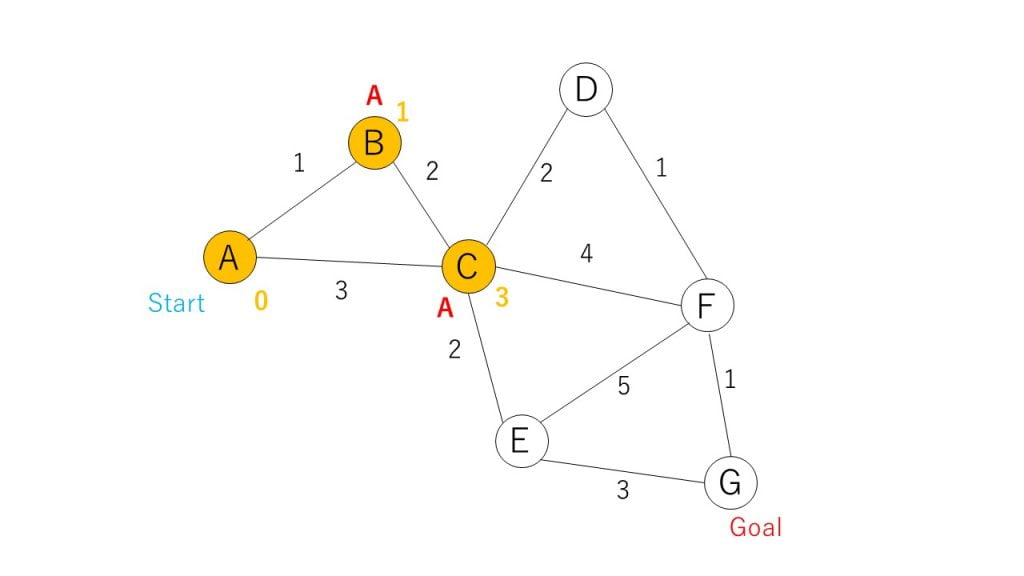
まず前回と同じグラフを考えます。

まずスタートノードを確定させます。コストは0です。
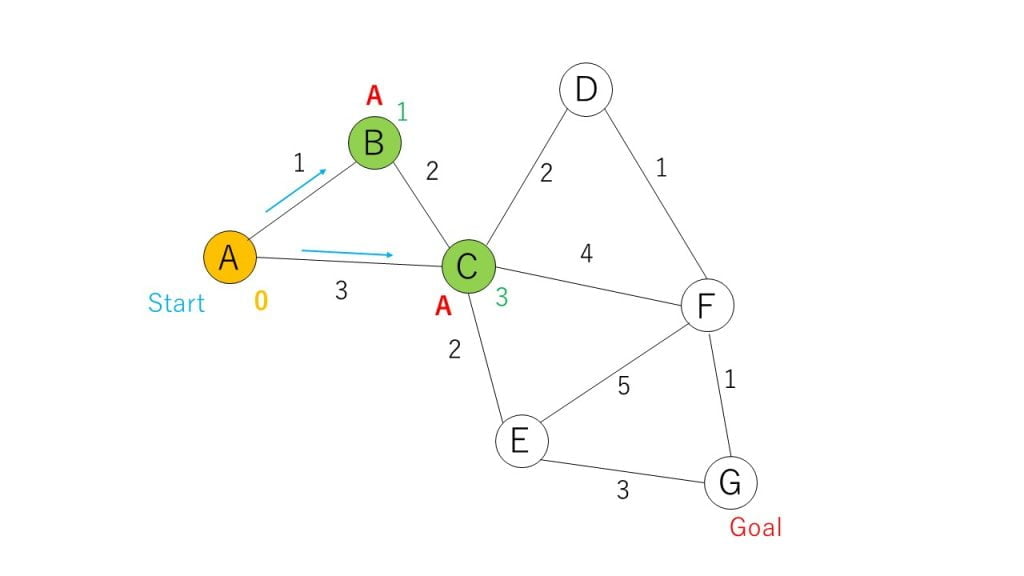
スタートノードの隣接ノードをチャレンジノード(緑)にします。
チャレンジノードにスタートノードからのコストと親として移動元のノードA(赤)を設定します。
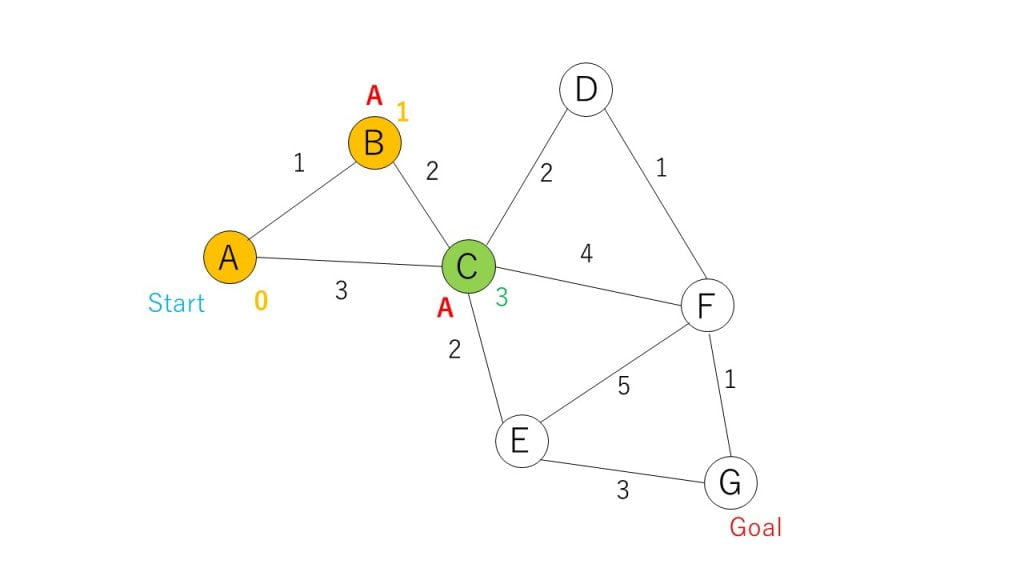
チャレンジノードのうち、コストが最小となるノードBを確定させます。
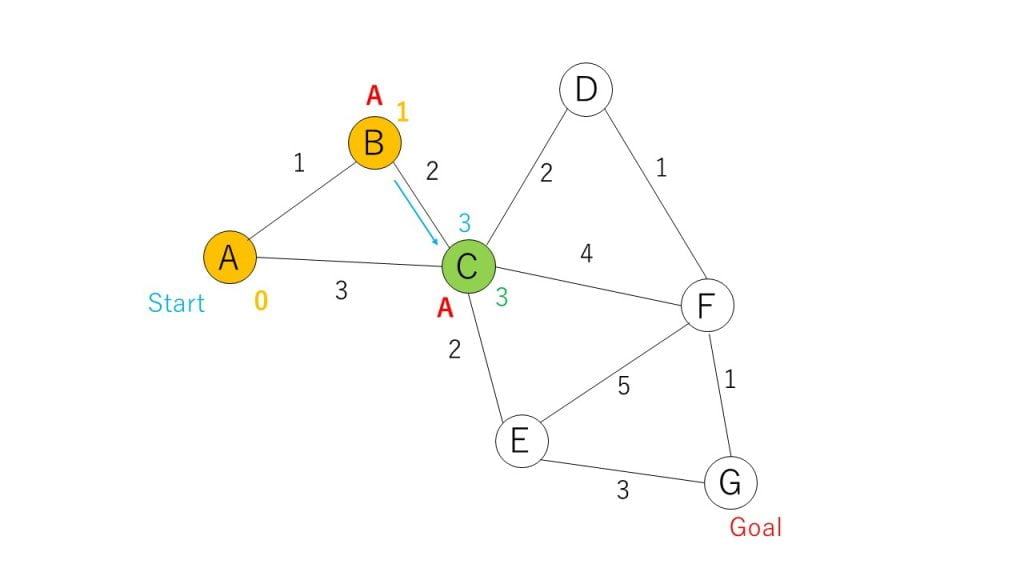
直近の確定ノードから確定ノード以外の隣接ノード(ここではC)へチャレンジします。
コストがそれまでのコストより小さくなったら、小さいほうのコストでノードのコストを更新します。
また更新があったら、移動元のノードを親として更新します。今回はコストが変わらなかったので更新しません。
チャレンジノードのうち最小のコストとなるノードを確定します。今回はノードCです。
直近の確定ノードから確定ノード以外の隣接ノードへチャレンジします。CからD,E,Fへチャレンジします。
Cのコスト3から隣接ノードへのコストを加算したコストをD,E,Fに設定します。
チャレンジしたら移動元のノード(C)を親として設定します。
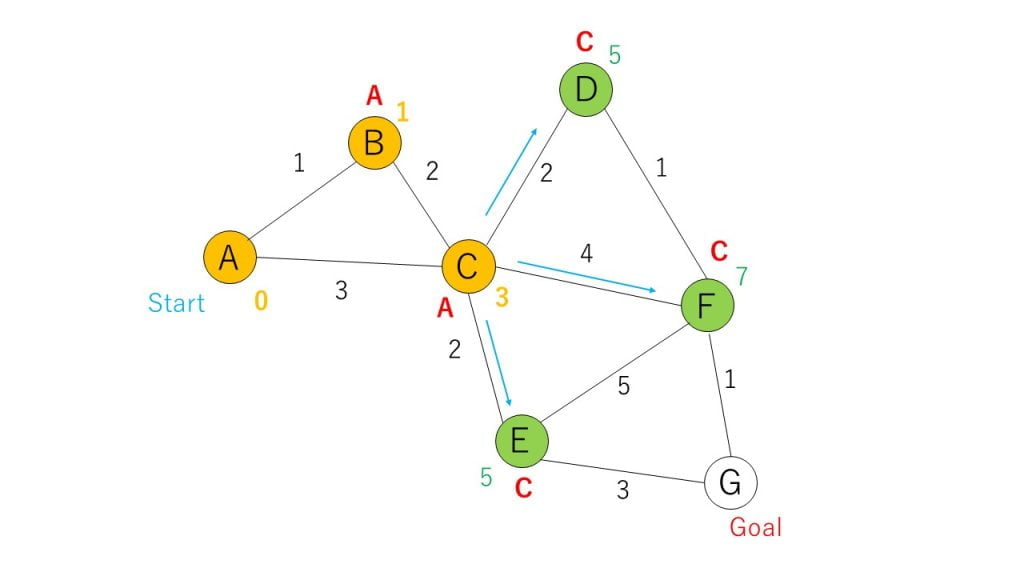
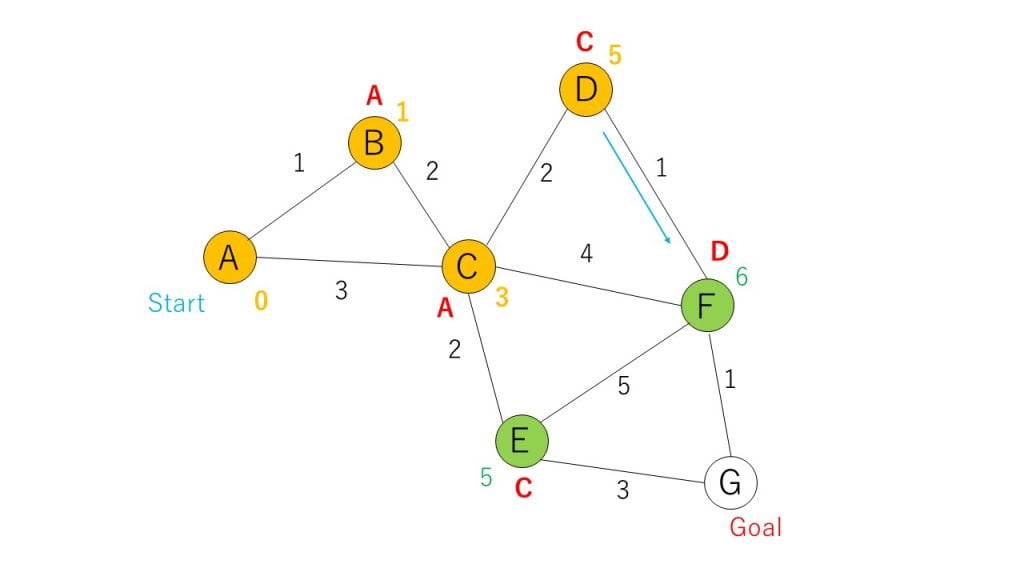
チャレンジノードのうち最小のコストとなるノード(D)を確定します。
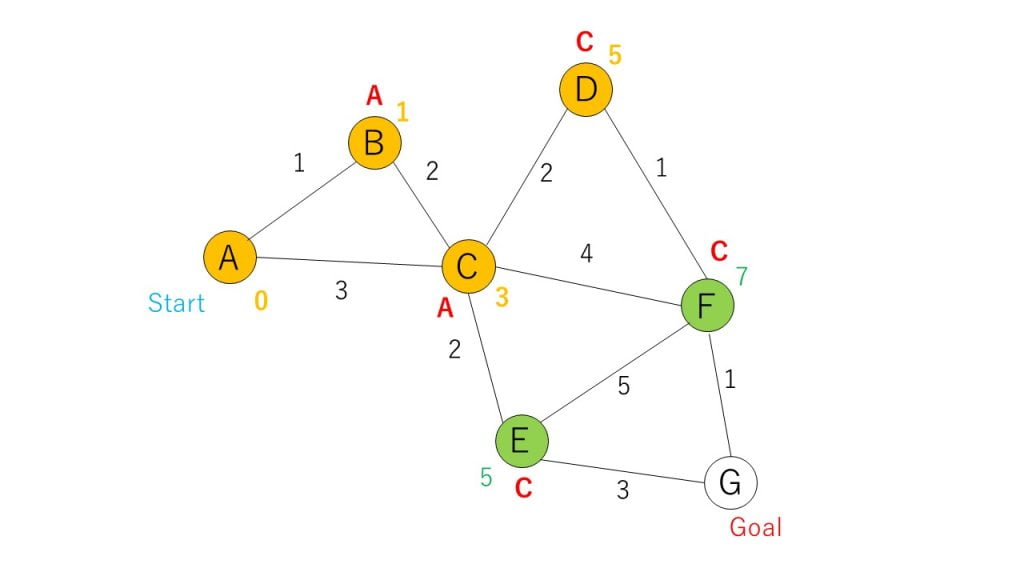
直近の確定ノードから確定ノード以外の隣接ノード(F)へチャレンジします。
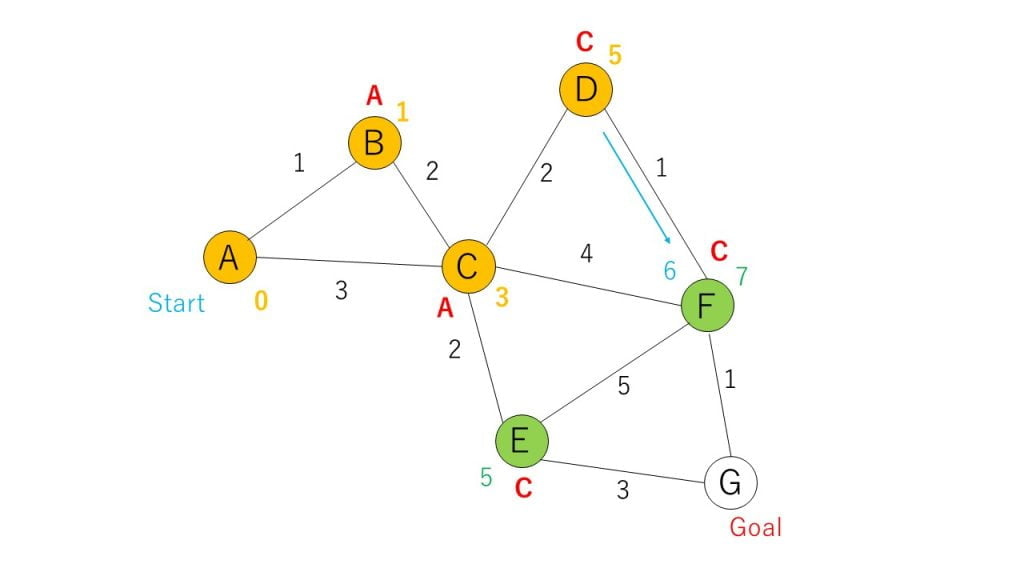
チャレンジノードのコストがそれまでのコストより小さくなったら、小さいほうのコストで更新します。
今回は小さくなったのでコストを7から6へ更新、Fの親をDで更新します。
チャレンジノードのうち最小コスト(E)のノードを確定します。
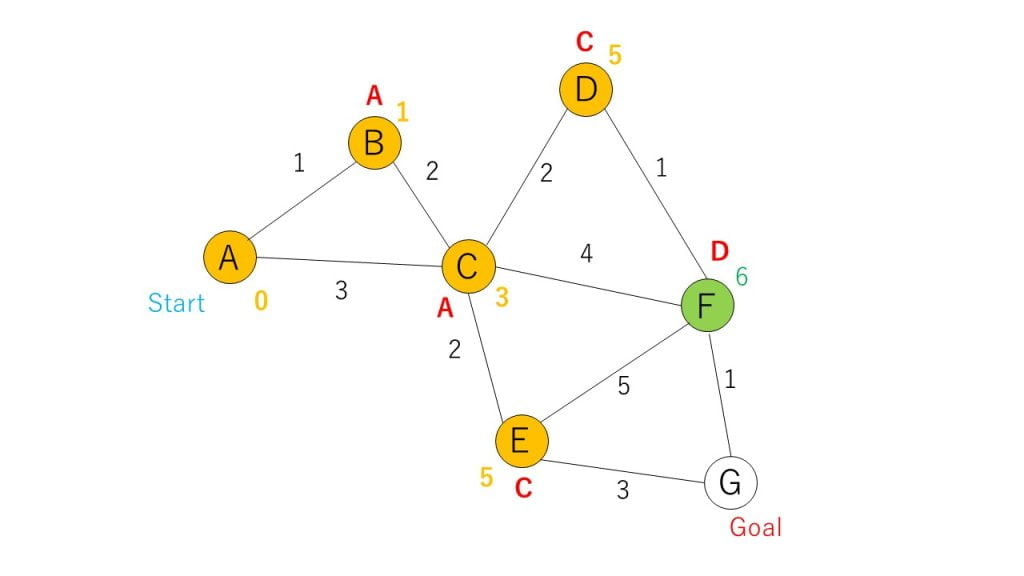
直近の確定ノードから確定ノード以外の隣接ノード(F,G)へチャレンジをします。
チャレンジしたノードのコストを、移動元のノードのコストにチャレンジノードへのコストを加算して算出します。
チャレンジノードのコストがそれまでのコストを下回るなら更新します。今回はE→Fは下回らないので更新しません。
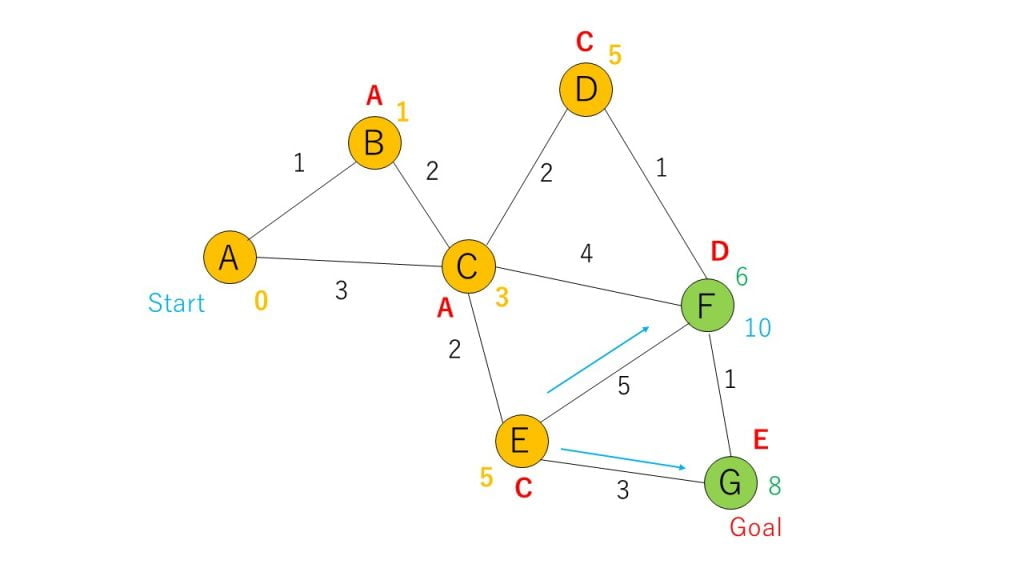
チャレンジノードのうち最小コストになるノード(F)を確定します。
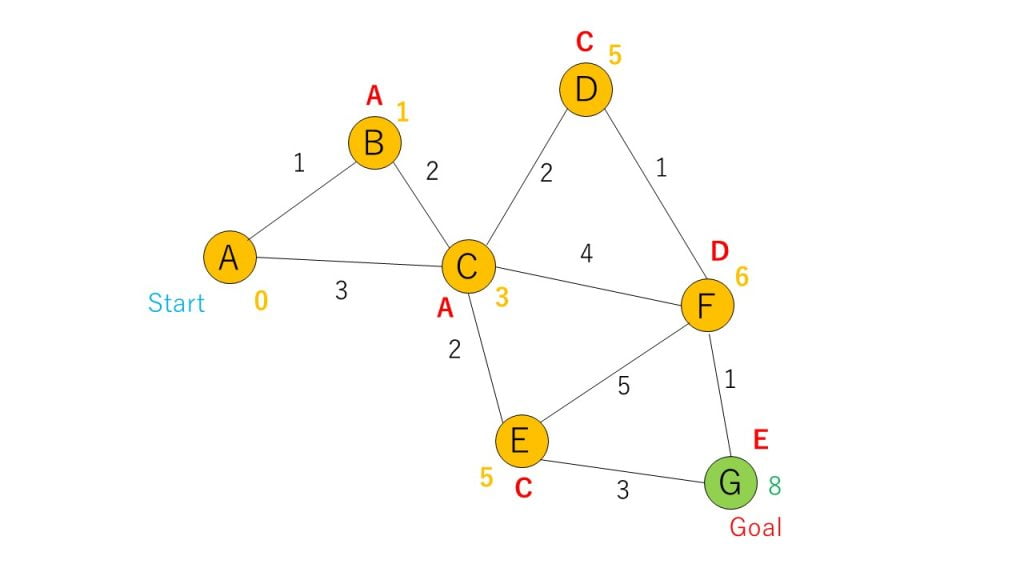
直近の確定ノード(F)から確定ノード以外の隣接ノード(G)へチャレンジします。
チャレンジノードのコストがそれまでのコストを下回れば、下回った方のコストで更新して、移動元のノードを親として設定します。
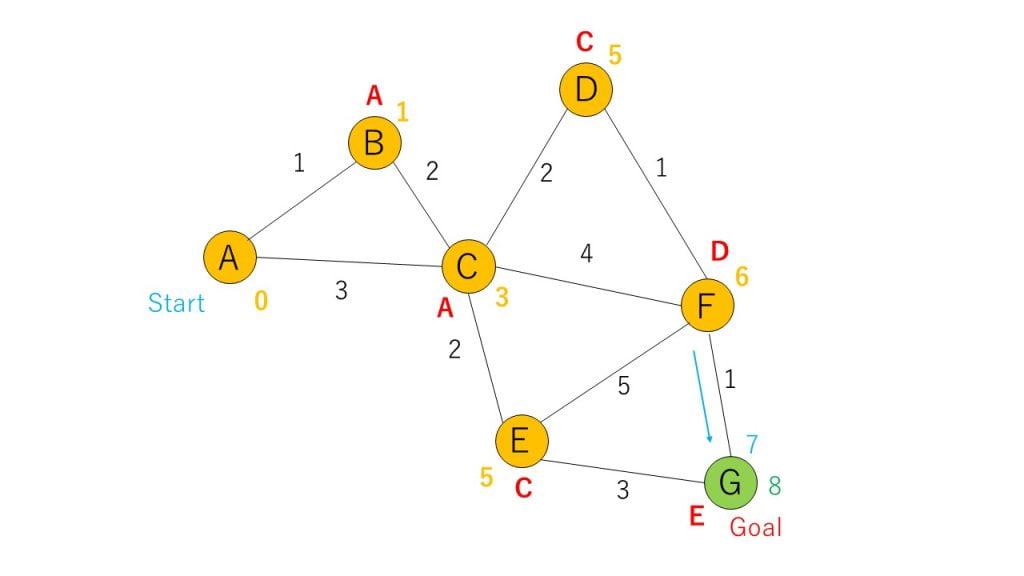
今回はGのコストが下回ったため、Gのコストを7で更新して、Gの親をFにします。
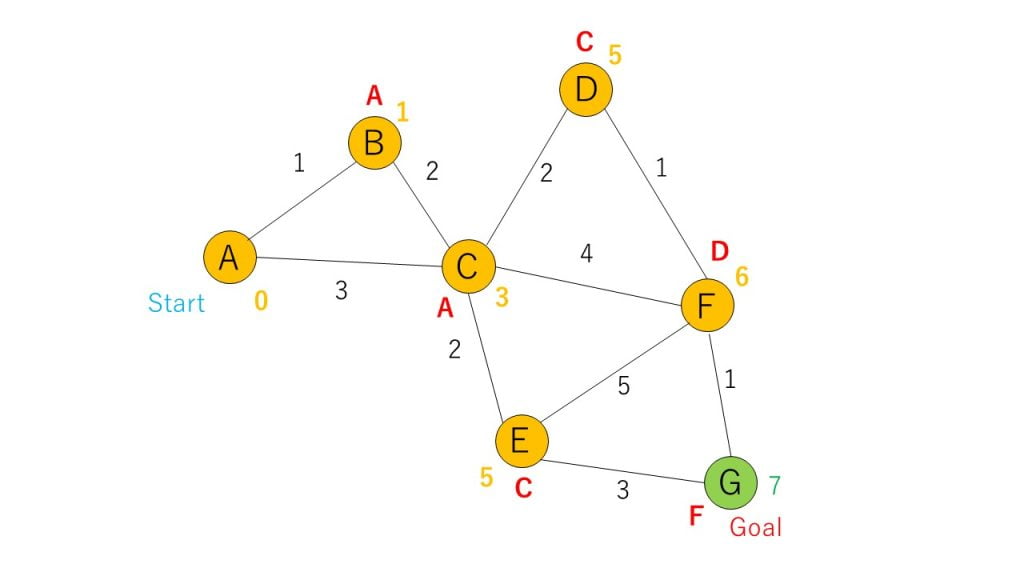
チャレンジノードのうちコストが最小のノード(G)を確定します。

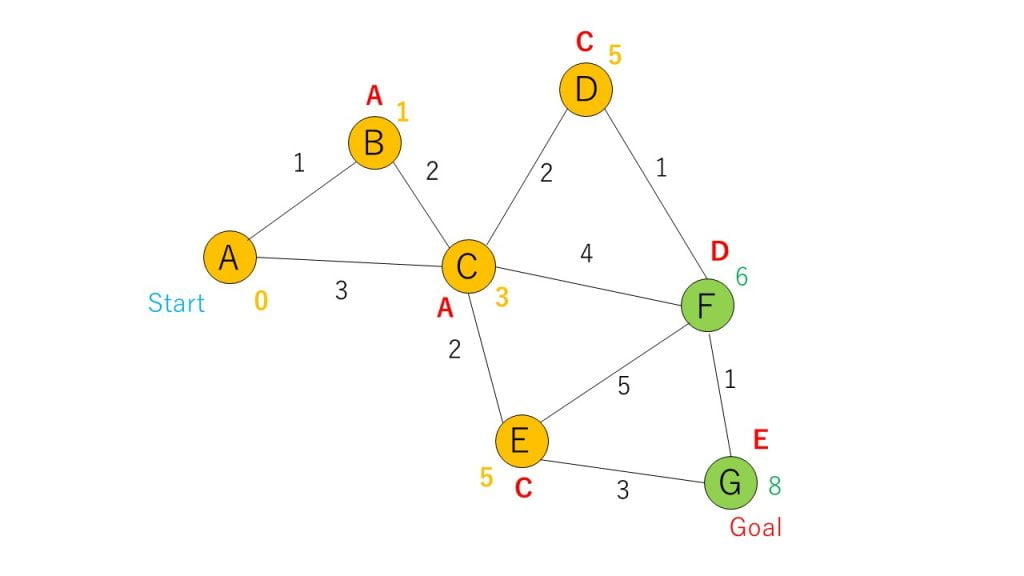
チャレンジノードがなくなったので終了します。
さてここからがルートの算出です。
AからGまでのルートを算出します。
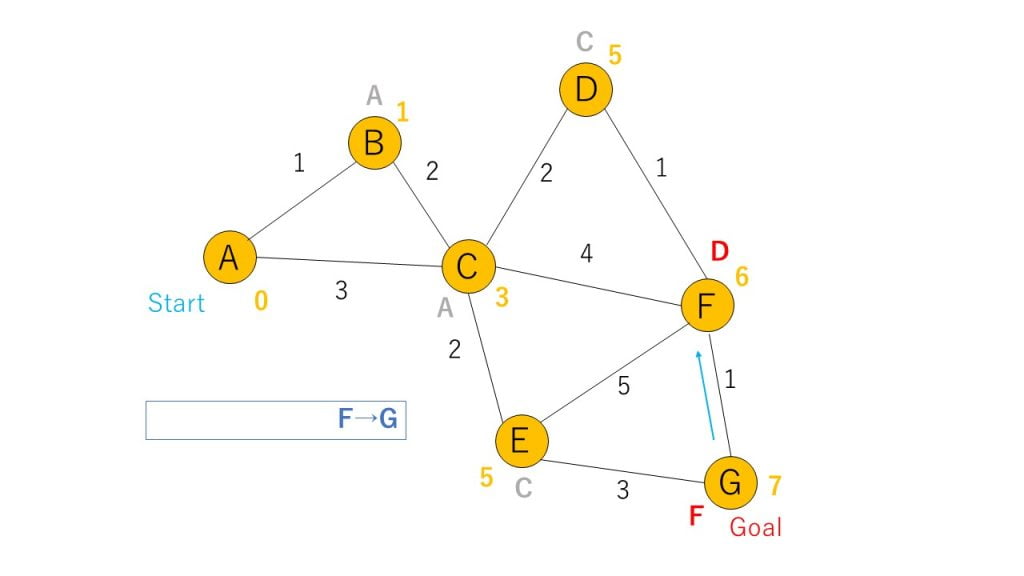
まずGをルートに追加します。Gの親はFなので、Fを参照します。
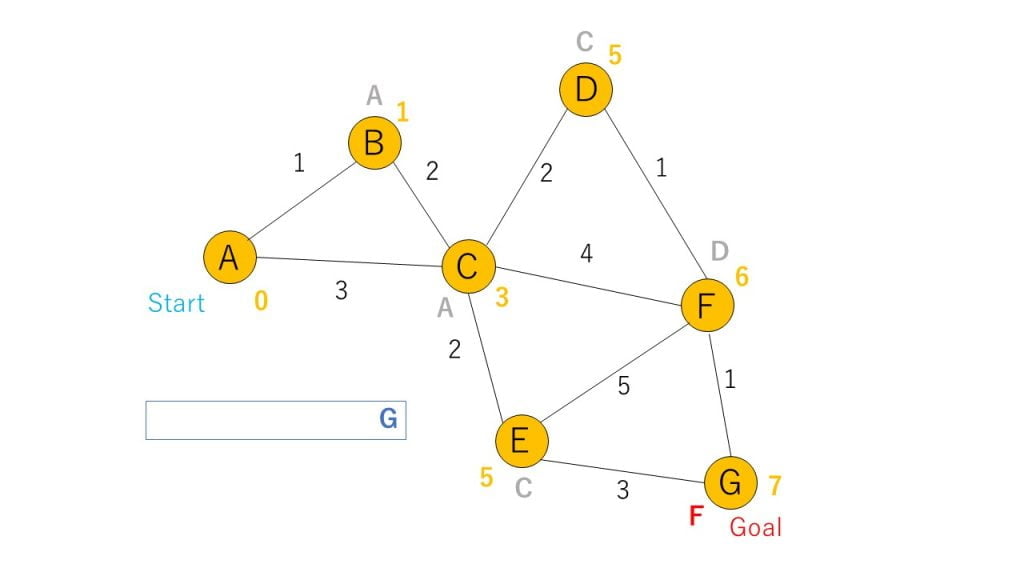
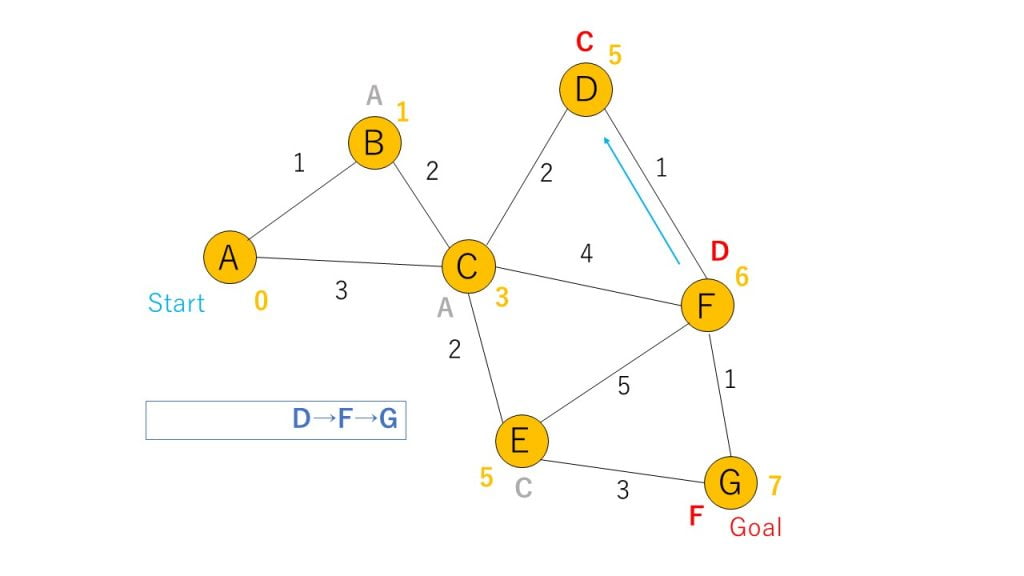
Fをルートに追加します。Fの親はDなのでDを参照します。
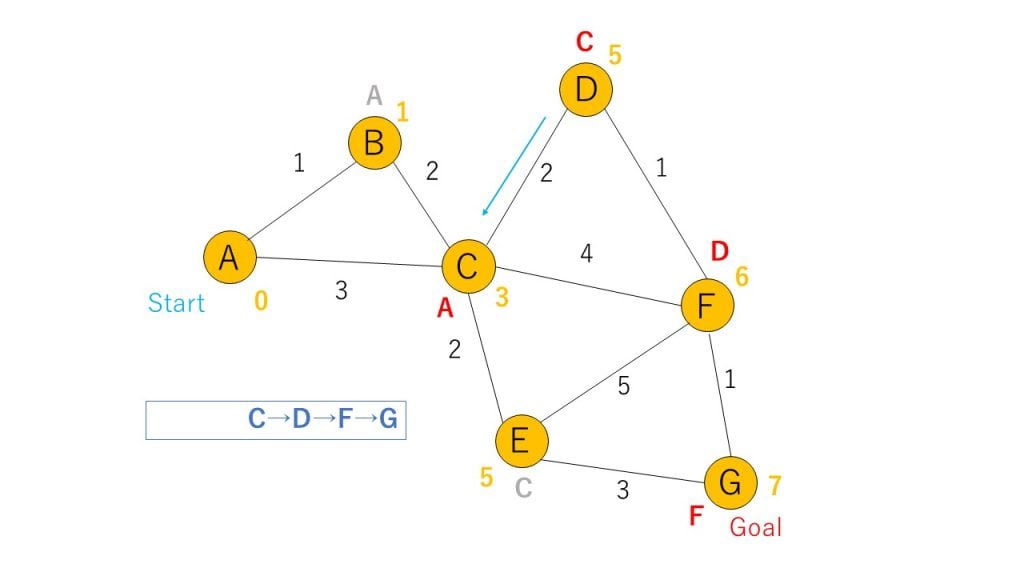
Dをルートに追加します。Dの親はCなのでCを参照します。
Cをルートに追加します。Cの親はAなのでAを参照します。
Aをルートに追加します。スタートノードへ到達したのでルートの算出を終了します。
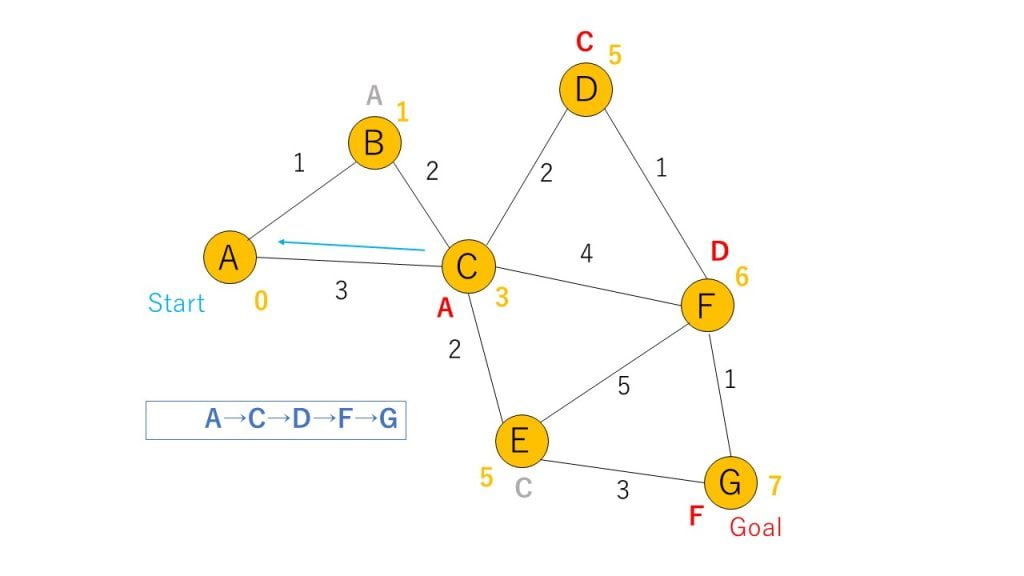
これでルートを逆から読めばAからGまでのルートがわかります。
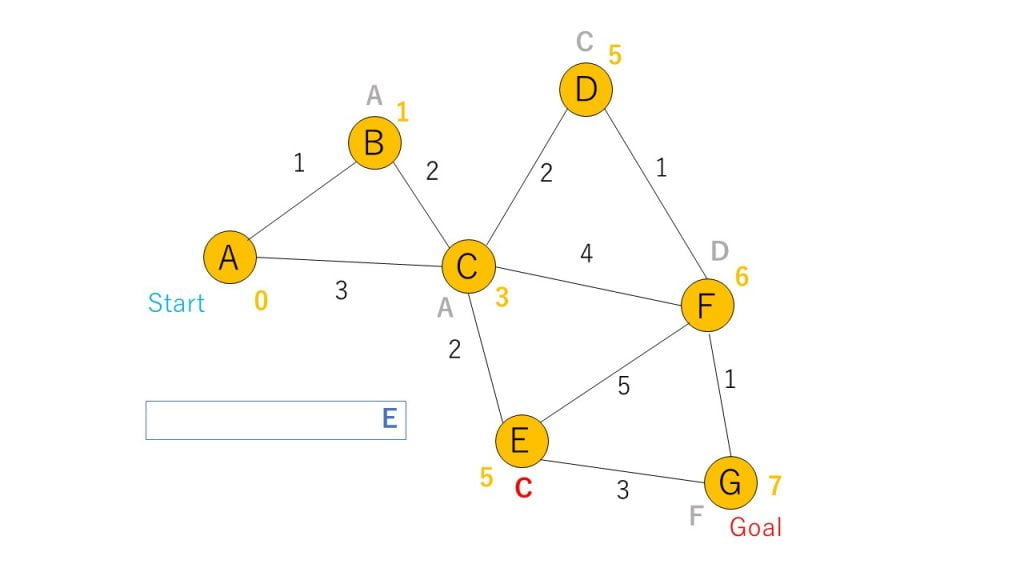
今回出てこなかったEへのルートも算出してみます。
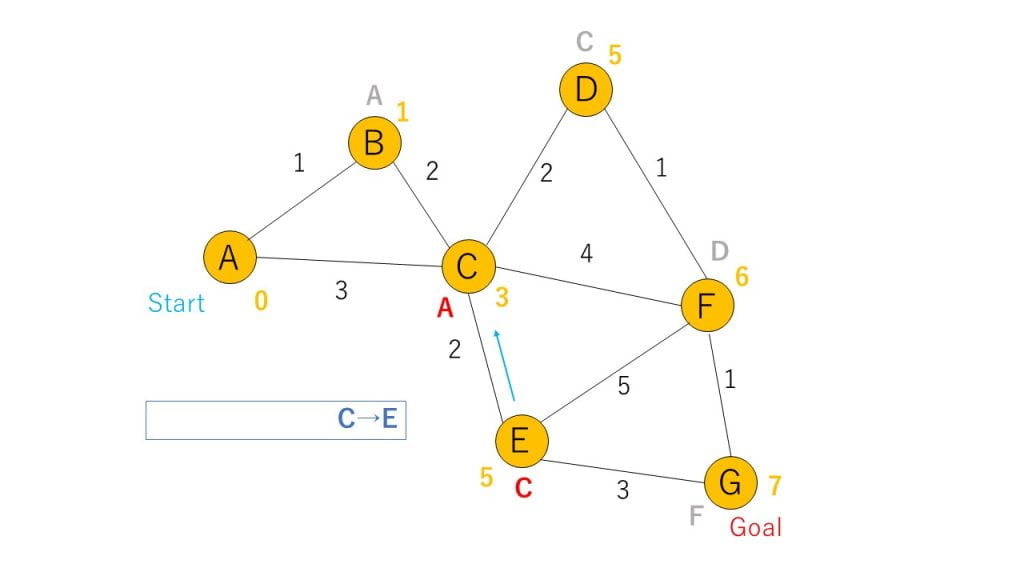
Eをルートに追加します。Eの親はCなのでCを参照します。
Cをルートに追加します。Cの親はAなのでAを参照します。
Aをルートに追加します。

ルートを逆に読むことでAからEまでのルートがわかります。
以上ルートの算出でした。
続きます。